目标
在这一章当中,
- 我们将了解霍夫变换的概念。
- 我们将看到如何使用它来检测图像中的线条。
- 我们将看到以下函数:cv.HoughLines(),cv.HoughLinesP()
理论
如果可以用数学形式表示形状,则霍夫变换是一种检测任何形状的流行技术。即使形状有些破损或变形,也可以检测出形状。我们将看到它如何作用于一条线。
一条线可以表示为$y = mx + c$或以参数形式表示为$rho=xcosθ+ysinθ$,其中$rho$是从原点到该线的垂直距离,而$theta$是由该垂直线和水平轴形成的角度以逆时针方向测量(该方向随您如何表示坐标系而变化。此表示形式在OpenCV中使用)。查看下面的图片:
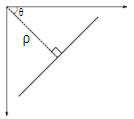
因此,如果线在原点下方通过,则它将具有正的$rho$且角度小于180。如果线在原点上方,则将角度取为小于180,而不是大于180的角度。$rho$取负值。任何垂直线将具有0度,水平线将具有90度。
现在,让我们看一下霍夫变换如何处理线条。任何一条线都可以用$(ρ,θ)$这两个术语表示。因此,首先创建2D数组或累加器(以保存两个参数的值),并将其初始设置为$0$。让行表示$ρ$,列表示$θ$。阵列的大小取决于所需的精度。假设您希望角度的精度为1度,则需要180列。对于$ρ$,大距离可能是图像的对角线长度。因此,以一个像素精度为准,行数可以是图像的对角线长度。
考虑一个100x100的图像,中间有一条水平线。取直线的点。您知道它的(x,y)值。现在在线性方程式中,将值$θ$= 0,1,2,..... 180放进去,然后检查得到$ρ$。对于每对$(ρ,θ)$,在累加器中对应的$(ρ,θ)$单元格将值增加1。所以现在在累加器中,单元格(50,90)= 1以及其他一些单元格。
现在,对行的第二个点。执行与上述相同的操作。递增$(rho,theta)$对应的单元格中的值。这次,单元格(50,90)=2。实际上,您正在对$(ρ,θ)$值进行投票。您对线路上的每个点都继续执行此过程。在每个点上,单元格(50,90)都会增加或投票,而其他单元格可能会或可能不会投票。这样一来,后,单元格(50,90)的投票数将高。因此,如果您在累加器中搜索大票数,则将获得(50,90)值,该值表示该图像中的一条线与原点的距离为50,角度为90度。在下面的动画中很好地显示了该图片(图片提供:Amos Storkey)
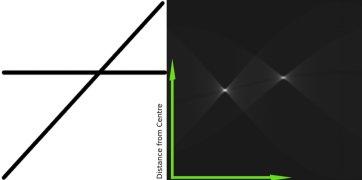
这就是霍夫变换对线条的工作方式。它很简单,也许您可以自己使用Numpy来实现它。下图显示了累加器。某些位置的亮点表示它们是图像中可能的线条的参数。(图片由维基百科提供)
OpenCV中的霍夫曼变换
上面说明的所有内容都封装在OpenCV函数cv.HoughLines()中。它只是返回一个:math:(rho,theta)值的数组。$ρ$以像素为单位,$θ$以弧度为单位。个参数,输入图像应该是二进制图像,因此在应用霍夫变换之前,请应用阈值或使用Canny边缘检测。第二和第三参数分别是$ρ$和$θ$精度。第四个参数是阈值,这意味着应该将其视为行的低投票。请记住,票数取决于线上的点数。因此,它表示应检测到的小线长。
import cv2 as cv
import numpy as np
img = cv.imread(cv.samples.findFile('sudoku.png'))
gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
edges = cv.Canny(gray,50,150,apertureSize = 3)
lines = cv.HoughLines(edges,1,np.pi/180,200)
for line in lines:
rho,theta = line[0]
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 + 1000*(-b))
y1 = int(y0 + 1000*(a))
x2 = int(x0 - 1000*(-b))
y2 = int(y0 - 1000*(a))
cv.line(img,(x1,y1),(x2,y2),(0,0,255),2)
cv.imwrite('houghlines3.jpg',img)复制代码检查下面的结果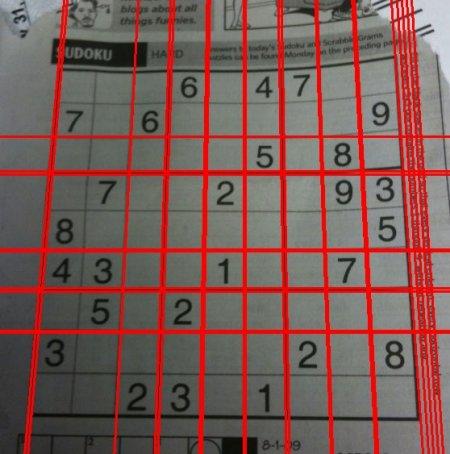
概率霍夫变换
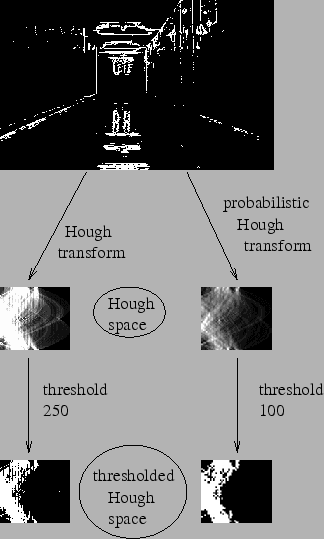
在霍夫变换中,您可以看到,即使对于带有两个参数的行,也需要大量计算。概率霍夫变换是我们看到的霍夫变换的优化。它没有考虑所有要点。取而代之的是,它仅采用随机的点子集,足以进行线检测。只是我们必须降低阈值。参见下图,比较了霍夫空间中的霍夫变换和概率霍夫变换。(图片提供:Franck Bettinger的主页)
OpenCV的实现基于Matas,J.和Galambos,C.和Kittler, J.V.使用渐进概率霍夫变换对行进行的稳健检测[145]。使用的函数是**cv.HoughLinesP**()。它有两个新的论点。
- minLineLength - 小行长。小于此长度的线段将被拒绝。
- maxLineGap - 线段之间允许将它们视为一条线的大间隙。
好的是,它直接返回行的两个端点。在以前的情况下,您仅获得线的参数,并且必须找到所有点。在这里,一切都是直接而简单的。
import cv2 as cv
import numpy as np
img = cv.imread(cv.samples.findFile('sudoku.png'))
gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
edges = cv.Canny(gray,50,150,apertureSize = 3)
lines = cv.HoughLinesP(edges,1,np.pi/180,100,minLineLength=100,maxLineGap=10)
for line in lines:
x1,y1,x2,y2 = line[0]
cv.line(img,(x1,y1),(x2,y2),(0,255,0),2)
cv.imwrite('houghlines5.jpg',img)复制代码看到如下结果:

附加资源
- Hough Transform on Wikipedia:http://en.wikipedia.org/wiki/Hough_transform
磐创AI技术博客资源汇总站:http://docs.panchuang.net/PyTorch官方中文教程站:http://pytorch.panchuang.net/OpenCV中文官方文档: http://woshicver.com/
