本文分享自华为云社区《VSCode一键接入Notebook体验算法套件快速完成水表读数》,作者:HWCloudAI。
本示例围绕真实AI需求场景,介绍VSCode一键接入Notebook体验算法套件快速完成水表读数的使用流程。
算法开发套件中目前提供自研(ivg系列)和开源(mm系列)共两套算法资产,可应用于分类、检测、分割和OCR等任务中。本示例中将组合使用自研分割算法(ivgSegmentation)和开源OCR算法(mmOCR)完成水表读数识别项目,并使用算法开发套件将其部署为华为云在线服务。
说明:
本案例教程仅适用于“华北-北京四”区域,新版Notebook。
准备数据
- 登录OBS控制台,创建OBS对象桶,区域选择“华北-北京四”。
- 登录ModelArts控制台,选择控制台区域为“华北-北京四”。
- 在“全局配置”页面查看是否已经配置授权,允许ModelArts访问OBS。如果没有配置授权,请参考配置访问授权(全局配置)添加授权。
- 分别下载本案例的数据集,水表表盘分割数据集和水表表盘读数OCR识别数据集到OBS桶中,OBS路径示例如下
obs://{OBS桶名称}/water_meter_segmentation 水表表盘分割数据集
obs://{OBS桶名称}/water_meter_crop 水表表盘读数OCR识别数据集
说明:
从AIGallery下载数据集免费,但是数据集存储在OBS桶中会收取少量费用,具体计费请参见OBS价格详情页,案例使用完成后请及时清除资源和数据。
准备开发环境
在“ModelArts控制台 > 开发环境 > Notebook(New)”页面中,创建基于pytorch1.4-cuda10.1-cudnn7-ubuntu18.04镜像,类型为GPU的Notebook,具体操作请参见创建Notebook实例章节。
本案例需要使用VS Code 远程连接Notebook,需要开启SSH远程开发。
图1 创建Notebook实例

1.实例的密钥文件需要下载至本地的如下目录或其子目录中:
Windows:C:\Users{{user}}
Mac/Linux: Users/{{user}}
2.在ModelArts控制台->开发环境 Notebook,单击“操作”列的“更多 > VS Code接入”。

如果本地已安装VS Code,请单击“打开”,进入“Visual Studio Code”页面。
如果本地未安装VS Code,请根据实际选择“win”或“其他”下载并安装VS Code。VS Code安装请参考安装VS Code软件。
如果用户之前未安装过ModelArts VS Code插件,此时会弹出安装提示,请单击“Install and Open”进行安装;如果之前已经安装过插件,则不会有该提示,请跳过此步骤,直接执行后面步骤
安装过程预计1~2分钟,安装完成后右下角会弹出对话框,请单击“Reload Window and Open”。
在弹出的提示中,勾选“Don’t ask again for this extension”,然后单击"Open"。
3.远程连接Notebook实例。
- 远程连接执行前,会自动在(Windows:C:\Users{{user}}.ssh或者downloads,Mac/Linux: Users/{{user}}/.ssh或者downloads)目录下根据密钥名称查找密钥文件,如果找到则直接使用该密钥打开新窗口并尝试连接远程实例,此时无需选择密钥。
- 如果未找到会弹出选择框,请根据提示选择正确的密钥。
- 如果密钥选择错误,则弹出提示信息,请根据提示信息选择正确密钥。
- 当弹出提醒实例连接失败,请关闭弹窗,并查看OUTPUT窗口的输出日志,请查看FAQ并排查失败原因。
使用算法套件进行开发
Step1 创建算法工程
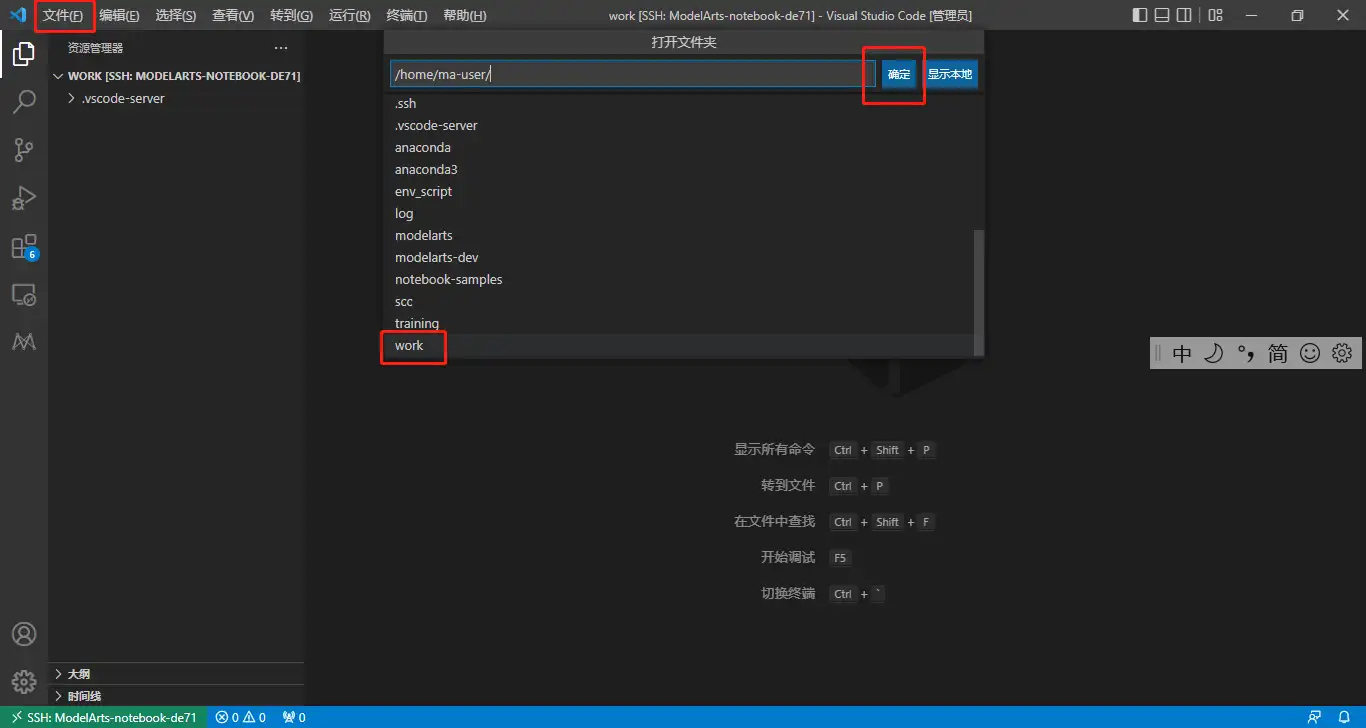
1.成功接入之后,在VS Code页面点击文件->打开文件夹,选择如下文件夹打开
2.新建终端
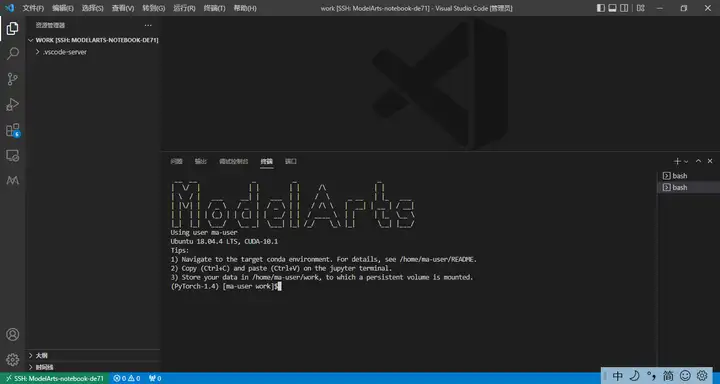
3.在work目录下执行
ma-cli createproject
命令创建工程,根据提示输入工程名称,例如:water_meter。然后直接回车选择默认参数,并选择跳过资产安装步骤(选择6)。

4.执行以下命令进入工程目录。
cd water_meter
5.执行以下命令拷贝项目数据到Notebook中。
python manage.py copy --source {obs_dataset_path} --dest ./data/raw/water_meter_crop
python manage.py copy --source {obs_dataset_path} --dest ./data/raw/water_meter_segmentation说明:
{obs_dataset_path}路径为Step1 准备数据中下载到OBS中的数据集,比如“obs://{OBS桶名称}/water_meter_segmentation”和“obs://{OBS桶名称}/water_meter_crop”
Step2 使用deeplabv3完成水表区域分割任务
1.首先安装ivgSegmentation套件。
python manage.py install algorithm ivgSegmentation==1.0.2
如果提示ivgSegmentation版本不正确,可以通过命令python manage.py list algorithm查询版本。
2.安装ivgSegmentation套件后,在界面左侧的工程目录中进入“./algorithms/ivgSegmentation/config/sample”文件夹中查看目前支持的分割模型,以sample为例(sample默认的算法就是deeplabv3),文件夹中包括config.py(算法外壳配置)和deeplabv3_resnet50_standard-sample_512x1024.py(模型结构)。
3.表盘分割只需要区分背景和读数区域,因此属于二分类,需要根据项目所需数据集对配置文件进行修改,如下所示:
修改./algorithms/ivgSegmentation/config/sample/config.py文件。

# config.py alg_cfg = dict( ... data_root='data/raw/water_meter_segmentation', # 修改为真实路径本地分割数据集路径 ... )
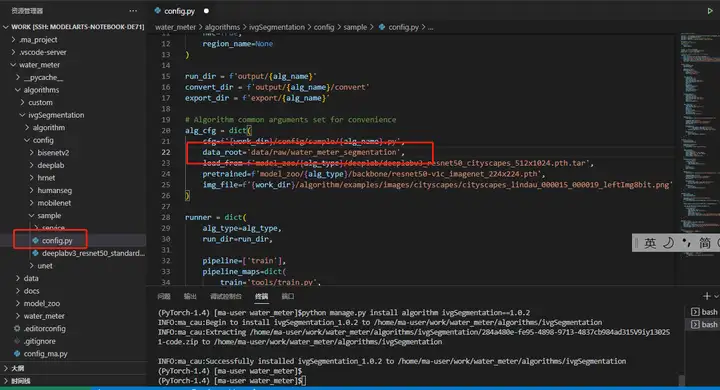
修改完后按Ctrl+S保存。
4.修改./algorithms/ivgSegmentation/config/sample/deeplabv3_resnet50_standard-sample_512x1024.py文件。
# deeplabv3_resnet50_standard-sample_512x1024.py gpus=[] ... data_cfg = dict( ... num_classes=2, # 修改为2类 ... ... train_scale=(512, 512), # (h, w)#size全部修改为(512, 512) ... train_crop_size=(512, 512), # (h, w) ... test_scale=(512, 512), # (h, w) ... infer_scale=(512, 512), # (h, w) )

5.修改完按Ctrl+S保存。
6.在water_meter工程目录下,安装deeplabv3预训练模型。
python manage.py install model ivgSegmentation:deeplab/deeplabv3_resnet50_cityscapes_512x1024
7.训练分割模型。(推荐使用GPU进行训练)
# shell
python manage.py run --cfg algorithms/ivgSegmentation/config/sample/config.py --gpus 训练好的模型会保存在指定位置中,默认为output/deeplabv3_resnet50_standard-sample_512x1024/checkpoints/中。
8.验证模型效果。
模型训练完成后,可以在验证集上计算模型的指标,首先修改配置文件的模型位置。
修改./algorithms/ivgSegmentation/config/sample/config.py。
# config.py alg_cfg = dict( ... load_from='./output/deeplabv3_resnet50_standard-sample_512x1024/checkpoints/checkpoint_best.pth.tar', # 修改训练模型的路径 ... ) # shell python manage.py run --cfg algorithms/ivgSegmentation/config/sample/config.py --pipeline evaluate
9.模型推理。
模型推理能够指定某一张图片,并且推理出图片的分割区域,并进行可视化,首先需要指定需要推理的图片路径。
修改./algorithms/ivgSegmentation/config/sample/config.py
alg_cfg = dict( ... img_file = './data/raw/water_meter_segmentation/image/train_10.jpg' # 指定需要推理的图片路径 ... )
执行如下命令推理模型效果。
# shell
python manage.py run --cfg algorithms/ivgSegmentation/config/sample/config.py --pipeline infer推理输出的图片路径在./output/deeplabv3_resnet50_standard-sample_512x1024下。
10.导出SDK。
算法开发套件支持将模型导出成一个模型SDK,方便进行模型部署等下游任务。
# shell
python manage.py export --cfg algorithms/ivgSegmentation/config/sample/config.py --is_deployStep3 水表读数识别
1.首先安装mmocr套件。
python manage.py install algorithm mmocr
2.安装mmocr套件后,./algorithms/mmocr/config/textrecog文件夹中包括config.py(算法外壳配置),需要根据所需算法和数据集路径修改配置文件。以下以robust_scanner算法为例。
修改./algorithms/mmocr/algorithm/configs/textrecog/robustscanner_r31_academic.py,
# robustscanner_r31_academic.py ... train_prefix = 'data/raw/water_meter_crop/' # 修改数据集路径改为水表ocr识别数据集路径 train_img_prefix1 = train_prefix + 'train' train_ann_file1 = train_prefix + 'train.txt' test_prefix = 'data/raw/water_meter_crop/' test_img_prefix1 = test_prefix + ‘val’ test_ann_file1 = test_prefix + ‘val.txt’
3.安装robust_scanner预训练模型。
python manage.py install model mmocr:textrecog/robust_scanner/robustscanner_r31_academic
4.训练OCR模型。
初次使用mmcv时需要编译mmcv-full,该过程较慢,可以直接使用官方预编译的依赖包。
预编译包URL: https://download.openmmlab.com/mmcv/dist/cu101/torch1.6.0/index.html
pip install https://download.openmmlab.com/mmcv/dist/cu101/torch1.6.0/mmcv_full-1.3.8-cp37-cp37m-manylinux1_x86_64.whl
将./algorithms/mmocr/config/textrecog/config.py中的epoch(迭代数量)改为2,如下图所示:
python manage.py run --cfg algorithms/mmocr/config/textrecog/config.py
训练好的模型会保存在指定位置中,默认为output/${algorithm}中。
5.验证模型效果。
模型训练完成后,可以在验证集上计算模型的指标,首先修改配置文件的模型位置。
修改./algorithms/mmocr/config/textrecog/config.py
# config.py ... model_path = './output/robustscanner_r31_academic/latest.pth' ... # shell python manage.py run --cfg algorithms/mmocr/config/textrecog/config.py --pipeline evaluate
6.模型推理。
模型推理能够指定某一张图片,并且推理出图片的分割区域,并进行可视化。首先需要指定待推理的图片路径,修改algorithms/mmocr/config/textrecog/config.py文件,具体如下。
修改./algorithms/mmocr/algorithm/configs/textrecog/robust_scanner/config.py
... infer_img_file='./data/raw/water_meter_crop/val/train_10.jpg' # 指定需要推理的图片路径 ... # shell python manage.py run --cfg algorithms/mmocr/config/textrecog/config.py --pipeline infer
推理输出的图片路径在output/robustscanner_r31_academic/vis下
7.导出SDK。
# shell
python manage.py export --cfg algorithms/mmocr/config/textrecog/config.pyStep4 部署为在线服务
本次展示仅部署OCR服务, 包括本地部署和线上部署, 部署上线后调用部署服务进行本地图片的推理,获取水表的预测读数。部署在线服务,需要指定OBS桶以便保存部署所需要的文件。
1.在algorithms/mmocr/config/textrecog/config.py文件中配置OBS桶,即obs_bucket=<please input your own bucket here>。

2.执行下述命令:
python manage.py export --cfg algorithms/mmocr/config/textrecog/config.py --is_deploy # 导出部署模型 python manage.py deploy --cfg algorithms/mmocr/config/textrecog/config.py # 本地部署 python manage.py deploy --cfg algorithms/mmocr/config/textrecog/config.py --launch_remote#在线部署,会耗时一会儿,请耐心等待
点击此处,查看部署成功的在线服务
Step5 清除资源和数据
通过此示例学习完成创建算法套件流程后,如果不再使用,建议您清除相关资源,避免造成资源浪费和不必要的费用。
- 停止Notebook:在“Notebook”页面,单击对应实例操作列的“停止”。
- 删除数据:点击此处,前往OBS控制台,删除上传的数据,然后删除文件夹及OBS桶。
